1、目的
保证设备正常、正确使用,满足生产需要。
2、适用范围
适用于桥门式卸船机。
3、职责
资产管理部负责编制、修改、补充设备安全操作维护规程,并对规程的执行实行监督、考核。
操作者需严格按照操作规程操作设备。
4、具体内容
1、作业前
1.1 交接班
1.1.1 全面了解上个班次安全、生产、设备情况,掌握工作重点及注意事项。
1.1.2 对设备外观、安全装置、卫生状况,进行全面检查。
1.1.3 检查仪表、通讯、随机工具、消防设施是否齐全、完好。
1.1.4 检查并填写设备运行日志。
1.2 作业前的注意事项
1.2.1 排除影响卸船机行走的障碍物,确认在卸船机的行走范围内无障碍物,包括码头皮带机廊道上,
电缆沟槽以及码头水槽等处。
1.2.2 检查钢丝绳、滑轮组合件、抓斗等状况完好。
1.2.3 确认锚定装置处于打开状态和夹轮器处于无动作状态、锚定保险链条及插销挂钩良好并连接可靠;
防风系缆已脱开并与码头留出20cm的安全距离;防爬楔块已离开轨道,并挂在台车架上。
1.2.4 检查卸船机各机械传动装置的供油是否充分。
1.2.5 确认电源,电压正常。
1.2.6 确认各电气装置的开关以及操纵杆都在正常位置。
1.2.7 动机前必须对本机运行范围内进行检查,发现有“禁止合闸”修理牌,不得擅自动机,必须向值班长报告,
确定修理结束,由挂牌人撤去修理牌后,方可动机;发现有人或其他障碍物时,必须待人撤离,障碍物拆除后方可动机。
1.2.8 被安全钩所固定的前大梁松开,下放到正常的水平工作位置,并确保作业时不会与船舶吊杆、船台及其他机械相撞。
1.2.9 确认小车(包括2台前托绳小车和主小车)、司机室锚定销均已脱开。
1.2.10 确认水槽中有水、喷水除尘系统的汲水装置在水槽中。
1.2.11 检查调料板开度、调节丝杠转动是否灵活、挡料皮磨损状况。分料门是否在相应的位置。料斗有无堵塞,衬板状况是否良好。
1.2.12 检查悬挂、落料点缓冲托辊是否有脱槽、损坏。
1.2.13 司机室通电
1.2.13.1 进入司机室必须将跳水平台门和司机室门关好。
1.2.13.2 在司机室右联动台按“控制合”带灯指示按钮,指示灯亮,司机室操作有效。
1.2.13.3若原来为其它地方就地操作箱有效,如要转到司机室操作,所有操作箱必须先在原处分闸,
在该操作箱把“远程控制选择开关”打到“分”后在司机室按“控制合”通电。
1.2.14 作业前,按“试灯” 按钮,所有的指示灯将点亮,确认指示灯工作是否正常。
1.2.15 开机作业时,起升、开闭、小车机构都限为低速,必须在特殊模式做起升同步、小车同步、抓斗开闭极限设定后,
切换到普通模式才能以正常速度运行。
1) 选择特殊模式;
2) 移动左连动台主令手柄(小车动作),移动小车通过小车同步归零限位;
3) 移动右连动台主令手柄(起升动作),移动抓斗通过起升同步归零限位;
4)通过左联动台“抓斗限位调整/操作模式”按钮进行抓斗开斗和闭斗设定;
5) 当驱动器电子轴和实际同步归零后,选择普通工作模式,起升和小车动作允许以全速运行。
1.2.16运转各机构数分钟,检查其传动、制动是否正常可靠和灵活,起升、开闭、小车运行等各机构的限
位行程开关工作及传递信号是否正常、准确。
1.2.17在普通模式下抓斗完全打开,起升至正常进料斗高度,校核抓斗最低点距离接料板放下后最高点约1.1米。
1.2.18根据不同物料容重和含水率,将料斗下方的料斗门高度调整到合适位置(一般开度在10%),
通过控制振动给料器的振动频率来控制料流大小,确保按额定能力均匀出料,绝对禁止随意调节料斗门高度。
2、作业中
2.1司机应集中思想,看清手势及指令,眼随斗走,余光了望。
2.2 注意保持两机安全距离,两机距离相近时应主动减速。大机行走时看护人员应对电缆重点监护。
2.3 正常作业中,要注意风速仪的报警提示。在风力较大时,应放慢作业速度,风力超过七级(含七级),
卸船机应停止作业。按《大型机械防风管理规定》执行。
2.4各机构操作时,禁止利用限位开关来控制机构动作;禁止反打手柄来制动。作业过程中如果出现紧急异常情况,
司机应按下联动台上的紧停按钮,断开控制电源。当出现超程故障时,司机必须确认设备状态,然后在电气房合
旁路开关向相反方向移动设备。
2.5 司机严禁进入高压区域和低压电气室。
2.6 当机器发生故障时,必须及时与中控室联系,并及时报告班长,立即修复,禁止带“病”作业。
2.7 在停机进行故障修理时,未经修理人员同意,严禁动机。
2.8 司机应进行巡回检查:
2.8.1 检查各驱动机构是否有异常温升、振动、异音、串轴等异常现象,发现问题立即汇报处理。
2.8.2 检查钢丝绳有无出槽、绳根固定是否牢靠,接头有无断裂,滑轮工作状况是否完好,梨形绳套、C型环、抓斗等连接是否牢靠。
2.8.3 通过监视器监视出料情况。
2.8.4 检查分叉漏斗有无被物料打穿及漏料情况。
2.9 运转中,严禁触及转动部件,严禁在运行中对转动部件进行清扫、维护保养等工作。
2.10 遇有大雾、冰雪、大风等恶劣天气影响安全操作时,应及时向值班调度报告,采取有效措施,加以防范,确保安全。
2.11 物料处理系统:
2.11.1 用“给料器开”和“给料器关”按钮来操作振动给料器,用“给料速度增加/减小”开关选择给料的速度,
普通模式与自动模式下,当出料口对应的地面皮带开始运行,且料斗中的料量>80%(160吨)的额定负荷时,
振动给料器自动运行;当料斗中的料量<20%(40吨)的额定负荷时, 振动给料器自动停止运行。
振动给料器振动频率应保持在70%及以上;作业中根据物料情况来调整料斗门的开度:物料流动性较好时,
料斗门开度在20%至30%即可,不宜超过40%;物料流动性较差时可适当将料斗门开大;放料时料斗门只能开大,
如需关小料斗门则要在停止放料的情况下进行;分料门(翻板)只能在放料停止时操作,操作时司机应
确认分料门上及两侧间隙的物料已被清理干净,以避免造成分料门推杆断裂或推杆电机过载。
2.11.2 振动电机连续开动时间不能超过30秒,以免损坏电机和金属结构,在物料很少时振动时间更短,只要点动就可。
2.11.3 作业结束时,在特殊模式下可清空料斗。
2.11.4 料斗里储存的物料太重时,超过120%的额定负载(240吨)时,由于联锁保护,此时抓斗不能正常开斗,
必须要等物料减少后才能恢复正常。此时,司机不要做任何动作,以免引起钢丝绳跳槽故障。
2.11.5 将左联动台功能选择开关转到抓斗位置,同时将左联动台“模式选择开关”转到普通模式即可进行手动卸料,
抓斗的开闭、升降的速度及小车运行速度和抓斗的防摇等皆由操作人员控制。
2.12 自动功能:
自动工况的准备:主驱动系统: 起升,开闭和小车必须同步,抓斗闭极限和开极限位置设定完成。
2.12.1 船型设定:
自动功能运行前, 必须完船型设定,具体操作步骤如下:
1) 在“正常方式”下, 抓斗打开至最大。
2) 把“运行/调整方式”选为调整方式,该按钮灯熄灭,可通过同时按下“船舱高度”+ “船舱内侧” 或“船舱外侧”
按钮来重新设定船型。
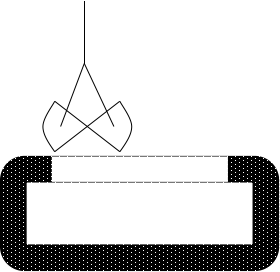
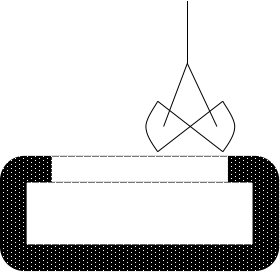
3) 先将抓斗移至船舱内侧附近, 使抓斗内侧边缘对准船舱内侧边缘(参见下图),按下“船舱内侧”设定按钮,
此按钮灯点亮, 表示设定有效。
4)
再将抓斗移至船舱外侧附近, 使抓斗内侧边缘对准船舱内侧边缘(参见下图),按下“船舱外侧”设定按钮,
此按钮灯点亮, 表示设定有效。
5) 先将抓斗移至船舱高度,使抓斗下边缘与舱口对齐(参见上图), 按下“船舱高度”, 设定按钮, 此按钮灯点亮, 表示设定有效。
6) 按下“运行/调整方式”按钮,此按钮灯点亮,表示系统进入正常运行方式。
2.12.2 半自动和自动运行只能在司机室操作,具体步骤如下:
1) 小车在料斗上方的回转点由联动台上的三位选择开关“小车回转点位置1/2/3”来设定。用“起升小车返程点”
小手柄调整抓斗在船舱侧的返程点,在CMS上会用一个可以移动的小方块表示。
2) 手动抓好料后, 先踩脚踏开关进行自动运行申请, 申请有效后会通过蜂鸣器给出提示,抓斗在手动方式下
继续上升到安全高度后,蜂鸣器会再给出提示,操作人员在2.5秒钟之内释放主起升手柄,进入自动运行状态。
在自动运行过程中,若操作起升、开闭、大车或小车手柄,将终止自动运行,进入手动操作方式。
3) 抓斗返回到船舱侧返程点,重复以上步骤。
2.13 禁止超负荷作业。
2.14 大车行走:
2.14.1 确保接料板移动范围内无障碍物(船上设施)后才能行走,否则必须把接料板收起后方可行走。
2.14.2 行走轨道上不准有障碍物;确认下横梁及其它部位是否会与码头上物品相撞。
2.14.3 确认大车电缆导缆、收缆、卷缆情况。
2.14.4 行走前司机必须判明、确保大梁移动范围内无障碍物(船上设施)后才能行走,否则必须把前大梁收起方可行走。
2.14.5 行走时必须逐档加、减速。进行锚定装置对位时,应在大车陆侧操作站进行操作。
2.14.6 行走时,禁止操作其它机构动作。
2.15 前大梁俯仰操作(司机室只能自动操作,且只能使前大梁在水平位置和60度之间运行。俯仰操作室可以自动操作,直至挂钩。)
2.15.1 确认小车及托绳小车锚定、抓斗放在漏斗格栅板上、司机室在停车位置。
2.15.2 确认前大梁上无人及杂物;
2.15.3 踏响报警器;
2.15.4 前大梁起升应先用低速档操作,确认前大梁动作后,再用高速档;
2.15.5 前大梁非事故性中途停机须先减速;
2.15.6 前大梁挂钩时应用低速档操作,操作完毕,确认挂钩准确挂住前大梁;
2.15.7 前大梁下放时,先收前大梁,确认前大梁脱离安全钩后,抬起安全钩,方能下放;
2.15.8 前大梁挂住或放下后,须确认俯仰钢丝绳处在松弛状态;
2.15.9 前大梁操作时,必须有专人指挥并观察钢丝绳的状态,防止钢丝绳挂到抓斗或其他结构;
2.16 吊运清舱机械
2.16.1 按《现场安全管理规定》有关清舱机械进出舱作业规范执行,必须在专人指挥下用专用吊索起吊,
做到平稳起升,慢速下降。
2.16.2 吊清舱机械时,将左联动台功能选择开关转到“特殊模式”位置,抓斗小车自动限为低速运行。
2.16.3 将抓斗小车开到停靠位置,手动挂钩。
2.16.4 起吊清舱机械时,抓斗必须关闭。
2.16.5 起吊结束后,回到起吊位置,手动摘下吊具。
2.17抓斗使用
2.17.1 抓斗限位调整:如果PLC断电, 更换钢丝绳或起升同步丢失时,必须用调整模式进行设定。
在抓斗所有限位调整好之前, 只允许使用“特殊模式”,抓斗调整方法如下:
1) 按下“抓斗限位调整/操作模式”按钮,该按钮灯熄灭表示进入调整模式。
2) 抓斗闭合,按下“闭极限设定”按钮,该按钮灯亮。该灯在抓斗开距大于闭极限时灯灭,正常操作时该灯亮用于
指示抓斗已经闭合到位。
3) 使抓斗打开到正常卸船时最大的位置,按下“开极限设定”按钮,该按钮灯亮。该灯在抓斗开距小于开极限时灯灭,
正常操作时该灯亮用于指示抓斗已经打开到位。
4) 再次按下“抓斗限位调整/操作模式”按钮, 该按钮灯亮,表示抓斗调整完成,进入正常操作模式。
该灯闪烁或不亮表示抓斗设定不正确。
2.17.2 司机必须正确判断潮位升降变化,及时调整起升高度,防止抓斗和船舶碰撞。
2.17.3 抓斗不允许超载。
2.17.4 作业时支持绳应松紧适度,以防止抓斗倒伏。
2.17.5 如出现抓斗倒伏,应慢慢提升支持绳。
2.17.6 根据不同的货物,选择适当的“物料选择”开关位置。
2.17.7 严禁在空中高速进行抓斗开闭操作、严禁在料斗、接料板上方闭斗。
2.17.8 当舱内有人和机械作业时,司机应特别注意舱内人员和机械位置,防止抓斗碰撞人和清舱机械。
2.18 换绳操作:
1) 在特殊模式下将抓斗打开到最大,下降至抓斗下边沿刚好接触地面,记录此时CMS中起升的起升高度。
2) 将起升和开闭的凸轮限位与卷筒脱开,并始终保持凸轮位置不变。
3) 钢丝绳换好后,再次将抓斗打开,下降至抓斗下边沿刚好接触地面,参考CMS中起升的高度是否与步骤1相同。
4) 将起升和开闭的凸轮限位与卷筒重新连接起来。
5) 在特殊模式操作起升并做同步,测试上升停止凸轮限位的位置是否准确,在正常模式下,测试卸船时上升停止的位置是否正确。
3、作业后
3.1 将卸船机停在锚定位置,放下锚定销,锚定时丝杆需调节到合理位置,安好防爬楔块。
3.2 将小车停在停车位置,抓斗打开放置在漏斗的格栅上。
3.3 在俯仰操作室收起前大梁,利用安全钩将其固定。
3.4 将司机室内的控制杆以及各个开关回到指定位置。
3.5 确认装在前大梁及海侧梯型架上的航空障碍灯是否在夜间都已点亮。
3.6 确认所有夹轮器是否处于合闸状态。
3.7 当预测到将会有暴风,或者长期停用卸船机时,必须利用锚定装置和防风系缆固定住卸船机。
3.8 当班作业完毕后,司机应做好清洁工作。
3.9 当班司机必须按要求认真填写运行记录、点检卡。
3.10 司机进行保养时,应切断电源,挂上标牌。
3.11 当遇到零度以下气温天气时,必须排空水泵、水箱和水管中的水。
3.12 交接班人员在现场交接,认真做好交接班工作,将职责范围内卫生区打扫干净。
严格执行《交接班管理规定》。
5、本规程自下发之日起执行。