由于青岛港老港区的地理特点,给巴拿马型满载船靠泊带来了许多困难,对引航员操纵满载船提出了更高的技术要求。本文以BARGARA轮为例,浅述了巴拿马船舶靠泊老港区中各个关键航段上的操纵及注意事项,以利于引航安全。
关键词:巴拿马型船舶 船舶操纵 浅水效应 靠泊
青岛港老港区,已有百年历史,但随着航运事业的蓬勃发展,航海技术的日新月异,船舶尺度的大型化,对于满载巴拿马型散货船,老港区已显得异常狭小,对于操纵技术的要求更为苛刻。本文以满载巴拿马型散货船从内锚地进港靠泊青岛港大港(老港区)57泊位为例,探讨操纵技术,共同提高引航水平。
港区泊位情况概括
青岛港大港(老港区)始建于1892年,位于胶州湾内,主要靠泊散杂货船,豪华邮轮等,由于建造年代久远,港池水域相对狭小,航道曲折,潮流复杂,同时青岛港又是军港,港内停泊诸多军舰、潜艇,无疑又增加了船舶操纵难度。大港布局如图1。

图1 青岛港老港区
57泊位(图2)处于大港四港池,泊位水深14.7米,长度283米,走向68度;港池宽度210米,长度630米,加上靠泊时58泊位、46泊位、47泊位停靠有船,使得可利用水域更小。
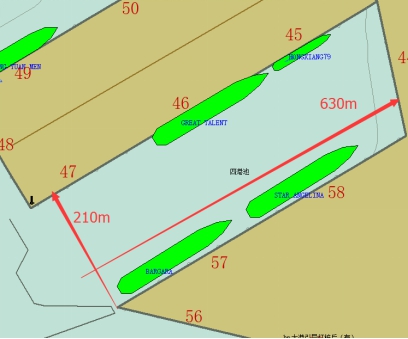
图2 57泊位
船舶概况
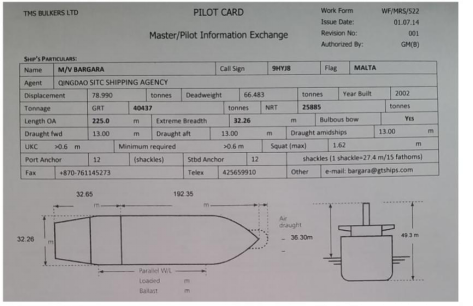
BARGARA轮为典型巴拿马型散货船,从pilot card可知,船长225米,船宽32米,本航次吃水DF13.0m、DM13.0m、DR13.0m,主机功率8550KW.排水量78990 t,载重吨66483t。详见pilot card。
当日潮汐资料:
28日 0037 82cm LW
0550 396cm HW
1257 -3cm LW
1913 395cm HW
图3 pilot card
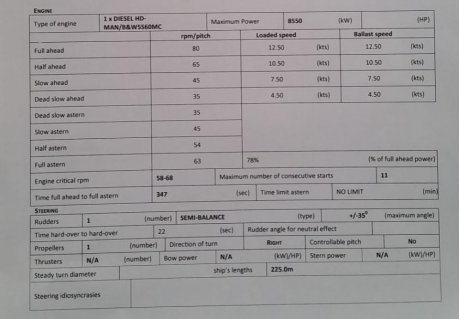
图4 pilot card
拖轮使用情况:出于操纵要求、安全保障,按照拖轮使用管理规章,使用二条拖轮,左舷船首、左舷船尾各配备1条,功率分别均为5000hp,主要用于对大船降速、协助转向、配合靠泊等。
满载巴拿马型船舶操纵特点:
船舶排水量大、惯性大,单位排水量分摊的主机功率小,停车和倒车制动性能差。
船体肥大,船舶方形系数大(Cb>0.8),总体操纵性能表现为船舶旋回性好,航向稳定性差。
浅水效应明显,当水深吃水比小于1.5时,主机负荷增加,阻力加大,降速明显,下沉量也会增加。
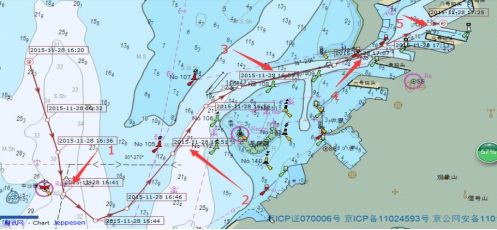
图5 进港航行图
起锚进港,谨慎航行
1、引航站提前通知BARGARA轮备妥主机,做好进港准备,引航员1600登船后,向青岛港VTS申请进港,征得VTS同意后,通知船长起锚。在此期间带妥两拖轮,1620锚离底并大船进车,从DEAD SLOW AHEAD 逐步加速至HALF AHEAD,将中沙礁灯船置于右舷侧。
2、 1641驶至途中1位置,船尾已清爽中沙礁灯船,航向175度、航速5节,此处右前方来流。观察105浮和108浮已经 “开门”,即转向时机已经成熟,加速至FULL AHEAD 并左满舵,顶流转向,再加上船舶所受斜航阻力,虽然主机转速增加,但船速并未相应增加;转至航向90度时,右正横来流,流速2节左右,此时船舶回转明显加快,且船速逐渐增加,故此时减小舵角以减缓船舶回转速率,航向60度时,航速已增至7节,大船右后方来流,回正舵,减车至HALF AHEAD,航向至25°时把定,船舶处于图中箭头2的位置。此位置右侧即马蹄礁,历史上不少船舶在此触礁,高度警惕,严格监控船舶动态。
3、 1651正横105浮,船速7节,航向25度,减车至SLOW AHEAD ,此时流向已转至左后方来流。中沙礁转向时175°,此过程转向角达150°,要把握好用舵时机,早用舵、大舵角、早回舵,转向时,要注意舵工操作,口令下达后,应核对舵角指示器,防止船的动态与发令效果不符。
4、 船尾清爽105浮后,则缓缓向右转向,将108浮置于右舷侧,1659至图中箭头3位置,船速6节,航向072°,流压减缓,流压角2°左右,容易把定,减车至DEAD SLOW AHEAD保持船位沿叠标线进港。但此航段的最低潮水深为13.0m,此时超高3米左右,富于水深有限,属于典型浅水水域,浅水效应明显:(1)兴波阻力急剧增大,螺旋桨上下桨叶推力之差更加明显,在驾驶台就可以感受到船体振动的加剧。(2)附加质量、附加惯矩增加,使得减速困难。(3) 舵效变差,必要时可借助于提高推进器转速以增加舵效 。
5、 1703船首进入大港防波堤,由于船首部分有防波堤的阻挡不受流的影响,而尾部则受流,转船力矩加大,船舶偏转加强,要严格警惕船首动向。必要时迅速增加主机转速,以提高舵效。整个船身进入防波堤后,流压变小,船舶航行态势趋于稳定,航速仍为6节,采用拖轮降速,使得大船至图中箭头4位置即大港口门时,船速降至5节一下为宜。
大船入泊,合理控制靠泊三要素
从大港口门到57泊位距离为0.6海里。1710正横旗台,速度4.5节,此航段采用大船不停车以维持舵效,两拖轮制动协助降速,使大船余速缓慢降至1.5节以下入泊,至图中箭头5位置(泊位后端),靠拢角5°左右为宜,1720大船停车,1725大船倒车,两拖轮收揽垂直于大船船身,协助控制船首向,调整船位。当船舶与码头横距为一倍船宽,余速为零,使大船与泊位平行,借助拖轮平推入泊,横移速度应控制于3~5cm/s为宜, 不宜过快,避免引起船体或碰垫设施受损。
结束语
由上述BARGARA轮进港靠泊的完整操作过程可以看出,青岛老港区航道曲折,碍航物多,潮流复杂,浅水环境,港池水域受限,对靠泊操纵提出了更高的要求,引航员应全面掌握本水域的地理特点、水文、气象资料,选择适当的进港时机,熟悉船舶的操纵性能,仔细研究操纵方法,充分考虑浅水效应,综合运用车、舵以及拖轮等操纵手段,安全顺利地靠泊码头,保障引航安全。
参考文献
[1] 赵月林.古文贤.船舶操纵.大连:大连海事大学出版社,2000:4-5
[2]方泉根.驾驶台资源管理的培训[J].航海技术,2001 (4):35-36.
[3]朱金善. 船舶避碰. 大连:大连海事大学出版社,2012:55-56

